
Bézout’s theorem requires us to count intersection points according to their multiplicity. OK, what’s multiplicity? (Fulton uses the phrase intersection number.)
Kendig and Fulton offer three equivalent definitions (or maybe four). Kendig first treats intersections between pieces of a curve (p.56)—branches, as they’re called. His second definition uses the resultant (pp.62–63). Fulton characterizes intersection numbers axiomatically, and defines them with a formula (§3.3).
Kendig’s first definition takes the prize for intuitiveness. I’ll build up to it, starting with one of the easiest examples, rising circles:

These are given by the equations 

Next, some cubics.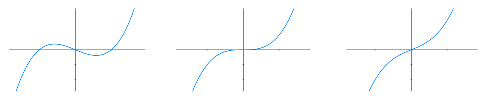
The equations are 

A third example: the cubics 
![x=\sqrt[3]{c},\omega\sqrt[3]{c},\omega^2\sqrt[3]{c}](https://s0.wp.com/latex.php?latex=x%3D%5Csqrt%5B3%5D%7Bc%7D%2C%5Comega%5Csqrt%5B3%5D%7Bc%7D%2C%5Comega%5E2%5Csqrt%5B3%5D%7Bc%7D&bg=ffffff&fg=333333&s=0&c=20201002)
The pattern is clear: multiple points split up when we “perturb” things a little. Before the perturbation, one point with multiplicity k; afterwards, k distinct points. Let’s use this as an informal definition of multiplicity, and see how it works out with our running example of Fulton’s E and F. Here’s E:


If we translate E up a little, or the x-axis down (y=c, c<0), we get four real intersections; translating the other way gives two real and two pure imaginary, as we saw in the last post. (Translating the x-axis is easier algebraically.) So our informal definition says the intersection of E and the x-axis at the origin O has multiplicity 4. This agrees with Bézout’s theorem for a quartic and the linear equation y=0.
It’s a similar story for F:
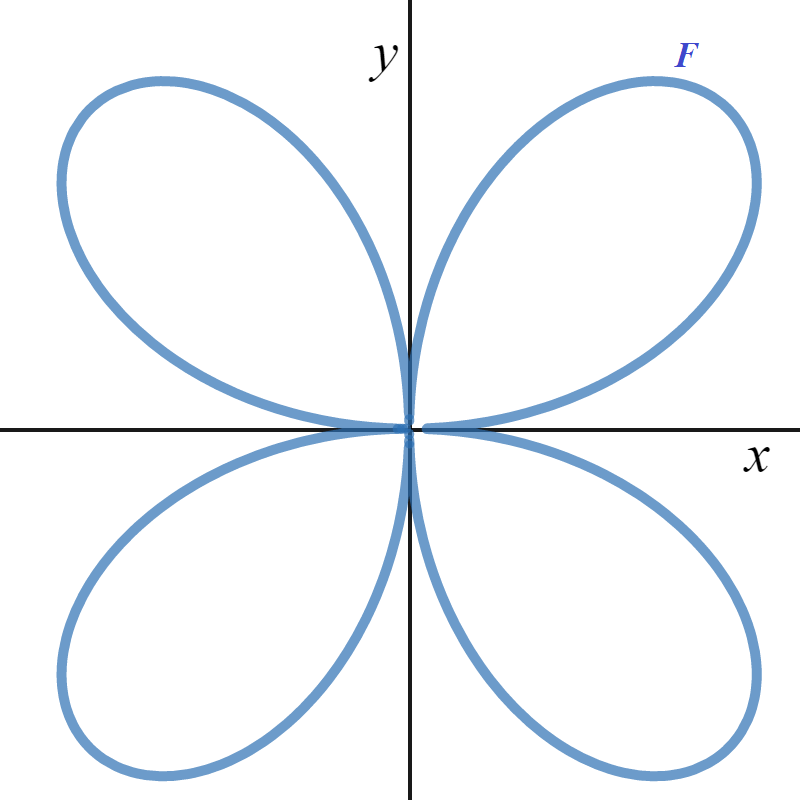

A sextic and y=0 ought to have six intersections. Translating the x-axis a little gives us six distinct intersections, two of them with pure imaginary x, as we saw last time. So the origin is an intersection with multiplicity 6.
So much for the intersections of E and F with the x-axis. What about the intersections of E and F with each other, at O? Some new perspectives help. First, break E and F into pieces (or branches, as they’re called) near O. Here are the branches of E passing through the origin:
As you can see using the informal definition, the red “horizontal” branch has a double intersection with the x-axis, while the other two branches have simple intersections. Terminology: curves intersect transversally at a point when they are not tangent there. (As is the case with the non-horizontal branches and the x-axis.) Altogether we have E intersecting the x-axis with multiplicity 4, as it should.
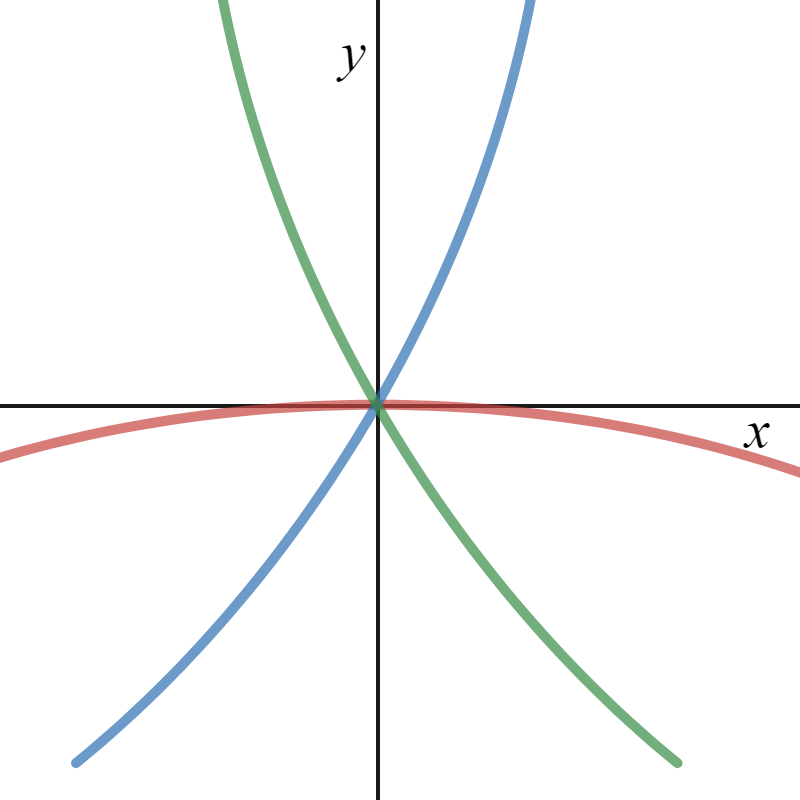
Likewise for F:

The “horizontal” branches contribute double intersections with the x-axis, the “vertical” branches simple intersections, totaling multiplicity 6.
How about E intersecting F at the origin? The three branches of E times the four branches of F suggest 12 intersections. But the horizontal branch of E intersects each horizontal branch of F doubly, by our informal definition, giving two more intersections. In short, if we perturb things just a little, we should (plausibly) get 14 distinct intersection points near O. Multiplicity 14, as promised last time.
Now we’d like to replace this informal perturbation definition with something more formal and algebraic. I’ll leave full details to Kendig (§3.2–§3.8)—lots of i’s to dot and t’s to cross. But if you’re willing not to sweat the small stuff, I can sketch the key ideas, and explain how they apply to Fulton’s E and F.
For the moment, let E and F be any two polynomials whose curves intersect at the origin O. Quick reminder: I like to overload the letters E and F, using them for both polynomials and associated curves. More overloading coming up soon.
New idea: think of F as a level curve of a polynomial function F(x,y). Imagine a moving point 

(overloading F). If F(t) can be expanded in a power series 



This picture illustrates the idea:

The branch $E_1$ intersects $F$ transversally, and clearly $F(t)$ is approximately linear—$E_1$ is “climbing uphill”. On the other hand, $E_2$ is tangent to the level curve $F=0$. At the point of tangency, $E_2$ is neither climbing nor descending $F$’s slope, so $dF(t)/dt$ will be zero.
The rising circle and rising cubic examples furnish another idea. Let F(x,y)=y. If E is the circle with c=1 (a double intersection), then 




This suggests: if
- E and F intersect at O, and
parametrizes a branch of E passing through O at t=0, and
is a convergent power series near 0 with
,
then
- k should be the multiplicity of the intersection of that branch of E with the curve F at O.
Building on this, we can define the total multiplicity at any intersection point of two curves:
For the multiplicity of the intersection of E and F at a point P, first translate the curves to move P to the origin O. Then find all branches of E passing through O. Add all the muliplicities of the intersections of these branches with F. Fact: if the roles of E and F are switched, you wind up with the same total multiplicity at the point.
This is, essentially, Kendig’s first definition of multiplicity (§3.6). Terminology: the order of a power series is the degree of its smallest nonzero term.
(I should mention one niggle; I won’t really address it until much later. You could artificially inflate the multiplicity by replacing t with a power of t. That is, replace the parametrization 
OK, we now reinstate E and F as Fulton’s two curves. Fulton doesn’t tell you this, but E and F are roses with simple equations in polar coordinates:


(Easiest way to see this: let z=x+iy=reit. Then the equation for E takes the form |z|4=Im(z3), and for F, |z|3=Im(z2). For F, square both sides to get the rectangular form. Kendig discusses roses extensively in §5.16.)
Since 



So these branches intersect the x-axis with multiplicity 2. Plugging 


again keeping only the lowest-order terms. So this branch of E has an intersection with multiplicity 6 with F (at O). That checks, intuitively at least: two simple intersections with the vertical branches of F, and two double intersections with the horizontal branches.
Let’s see how this agrees with the “perturbation” definition. We appeal to the level curve idea: look for intersections of the E branch with a nearby level curve of F. First we look for solutions to 


The other branches of E through the origin come from values of t near π/3 and 2π/3. Exercise for the ambitious: use this to compute some more branch multiplicities. Likewise, you can try switching the roles of E and F.
Changing the level of the level curve is one way to perturb an intersection. How about other methods? Here’s a plausibility argument for a more general result. Suppose a branch of a curve E crosses a curve F with multiplicity k. So 

Assume that’s a convergent power series for G(t). So if t is sufficiently small, all terms past 

Not even close to a rigorous argument. But suggestive nonetheless.
To conclude this post, here are pictures of a branch of F intersecting a level curve E(x,y)=ϵ, with ϵ>0 on the left and ϵ<0 on the right. There are four intersections, all distinct. On the left, two are real and two imaginary; on the right, all four are imaginary.
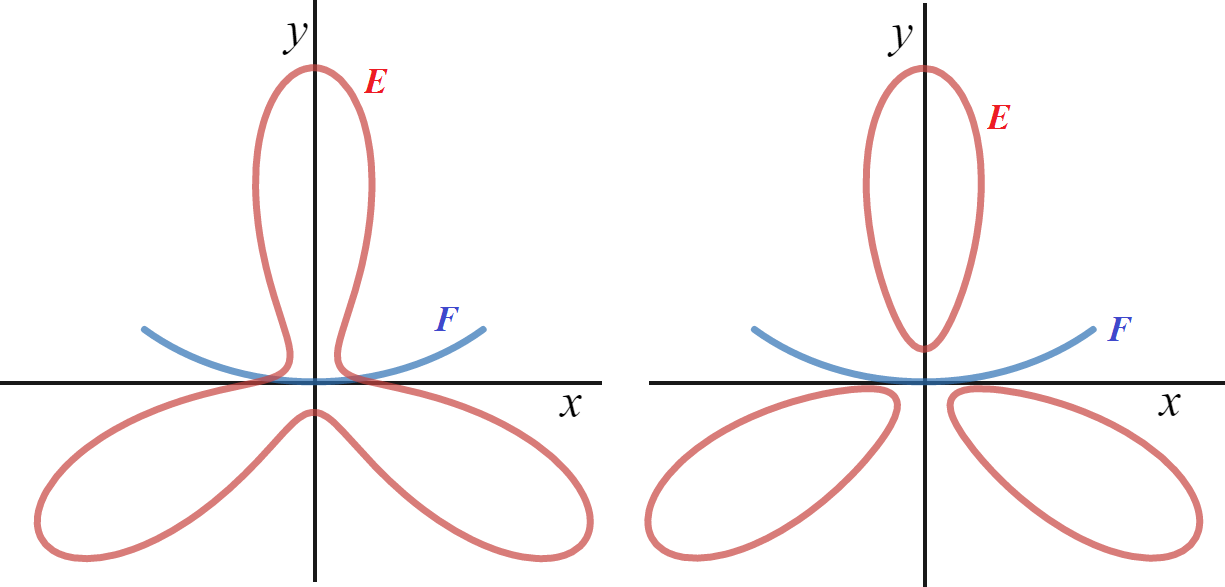
When I gaze at the left side of this figure, I picture an island with three hills, meeting at a lower elevation in the middle.
E(x,y) is the elevation at (x,y); sea level is z=ϵ<0. The red curve is the coastline. Let the sea level rise. When z=0,
the water submerges the middle except for one point. As sea level rises to z=ϵ>0, the hills separate into three islands: the right hand side of the figure. Now in that right hand side, imagine pushing the F branch down a bit, till it intersects the two bottom red lobes in four distinct points. Those are four real intersections of E and F. These will merge into two real intersections as we slowly move the F branch back up, then disappear entirely. It’s easy (and correct) to believe that the intersections have all become imaginary and distinct, especially remembering the example of the rising circles.
