
Last time we looked at Kendig‘s first definition of multiplicity. A branch of E, parametrized by (xE(t),yE(t)), passes through the origin O, as does the curve F. Assume xE(t) and yE(t) are power series in t. Plug them into the polynomial F(x,y), getting a power series F(t). The order of F(t) (the degree of the first nonzero term) is the multiplicity of that intersection—that is, of the branch of E with the entire curve F at O.
You’ll notice an asymmetry: we’ve defined the multiplicity for a branch of E with the curve F, at O. The elemental multiplicities, so to speak, are between two branches. For examples, these two branches of our running example, with t near 0:
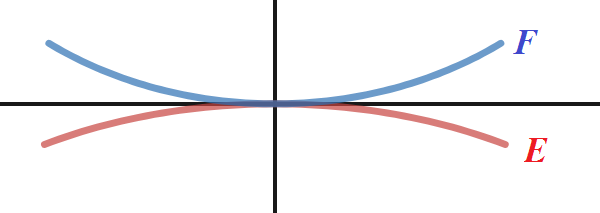
E: r = –sin 3t
F: r = sin 2t
As we saw last time, to lowest order these branches are parametrized by 


To limit our attention to just the branches, we eliminate t and write 



More generally, say the branches (near O) of two curves E and F look like yE=u(x), yF=v(x), for some power series u(x) and v(x). Plugging (x, u(x)) into Fbranch(x,y)=y–v(x) gives u(x)–v(x). The lowest order of u(x)–v(x) is the multiplicity of the intersection. Geometrically this makes perfect sense: the branches are functions of x near 0, and the (signed) vertical distance tells us the “degree of contact” between them.
Algebraically, we’ve taken two equations y–u(x)=0 and y–v(x)=0 and eliminated y, getting u(x)–v(x)=0. This is a special case of the resultant. I’ll say more about it in a later post, but briefly: the resultant of E(x,y)=0 and F(x,y)=0 with respect to y is an equation in x alone, obtained by eliminating y. The two equations can have a common solution only for those values of x satisfying the resultant. We’ll write resy(E,F)=0 for the resultant (with respect to y). When E(x,y) and F(x,y) are polynomials in x and y, it turns out that resy(E,F) is a polynomial in x. Likewise, resx(E,F) is the resultant with respect to x, a polynomial in y, telling you possible values of y at an intersection of E and F.
Maybe you’re wondering, “Hey, y–u(x) isn’t a polynomial in x and y!” Right you are. It’s a polynomial in y with coefficients in the ring of power series in x. And if E(x,y) is a polynomial in x and y, then we can treat it as a polynomial in y with coefficients in the ring of polynomials in x (or vice versa). So a common framework encompasses both cases.
Kendig’s second definition of multiplicity (§3.9) uses the resultant. Say E and F intersect at O, and suppose that O is their only intersection on the y-axis. One more proviso: treating E and F as polynomials in y with coefficients in the ring k[x], assume the leading coefficients are constants. (This rules out xy–1, for example.) The order of resy(E,F)—the degree of the lowest order term—is the multiplicity at O of the intersection of E and F. (See Kendig’s Theorem 3.3, p.62, for details.) This sums all the branch-branch multiplicities for the branches of E and F passing through O. You can also use resx(E,F) provided O is the only intersection on the x-axis.
If several intersections lie on the y-axis, then order of resy(E,F) is the sum of all the multiplicities of all these intersections (with the same proviso about leading coefficients). Kendig’s proof, with a little tweaking, shows this.
For our running example,
resx(E,F) = 16y14(16y2-5)2
and the multiplicity of O is 14, as we’ve learned. (I used SageMath to compute this.)
Returning to the general case: at the most granular level, we have the branch-branch multiplicities. Summing all these at a point P gives the intersection multiplicity at P. Fulton denotes this 
Before turning to Fulton’s definitions in the next post, a remark. I’ve been assuming that any branch of E(x,y)=0 near O has a parametrization (xE(t), yE(t)), with xE(t) and yE(t) power series in t. Actually more is true: you can always take xE(t) to be a power of t. (See Kendig §3.4.) However, the special form (x, u(x)) that we used above, with u(x) a power series in x, is not always possible.
